![]()
Animatronic Wolf's Tail (version 1.0)
Spine:
The tail's "spine" is made out of two "Klixx" toys (the red and black part), paper clips (the large kind), and brake cable (the kind used on bicycles). It operates on the simple push pull method like a real tail. As you can see it is very flexible.

![]()





Here are some close up pics of the tail spine:






Actuators:
The tail's Actuators are made out of two "off the shelf" servo motors, with home made pulleys attached, to convert the rotary motion of the servo motor into the liner push pull motion that the spine needs, in order to move.




Servos operate by using a 1ms to 2ms pulse every 20ms, with 1ms equaling all the way right, 1.5ms equaling center, and 2ms equaling all the way left. however this is for 90° operation, most servos can do 180°, internal stops prevent rotation past a certain point. It will be found that making a signal pulse more then 2ms, or less then 1ms, will cause a servo to keep rotating farther in its respective direction, until it encounters an internal stop.
The servos used in the tail are standard hobby servos capable of 42oz/in of torque, servos for future tails will use 56.9oz/in of torque, this allows for a heaver tail to be moved, or a lighter one moved faster.
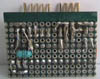
Microcontroller ( Tail version 1.0 ):
The proper signals to drive the servo motors are generated by the microcontroller. The microcontroller used was the Scenix SX28AC/DP, it runs a small finite state machine with the following states: slow wag, fast wag, stop wag, tail tuck, tail raise, tail normal. More states can be added if needed.


The microcontroller takes user input from two push button switches which can be concealed in a paw, or under clothing One button controls the wag speed, the other controls the tail position:


The power for the servos comes from a 3.6 amp hour 6-volt camcorder battery, this battery also powers the microcontroller, via a 5-volt regulator.
( Tail Version 1.1 ):
The microcontroller in now in the tail, it still uses the same two push buttons as shown above



The program header is accessible through the belt loop, so you don't have to disassemble the tail to reprogram the microcontroller



Fur Covering:
You can't have a wolf's tail with out "wolf like" fake fur, although, I wanted to do it in white fur and then have it airbrushed to look like a real wolf's tail, but I ran out of time.




Final Pics:
The microcontroler can currently do the following:
The tail while it is in the off position, when off it acts just like a static non-animatronic tail:


The tail while it is in the on position, notice it goes to a slightly curved position:


The tail while it is in the tuck position, in case you get yelled at:


The tail while it is in the raise position, for showing you are the Alpha, and for going down stairs with out dragging your tail:


The tail while it is wagging, this is fast wag:



Videos:
Because Still pics don't do it justice:
Me padding around with the finished tail wagging
tailwag.mpg (2.45 megs)
Me testing all the features of the tail, the oscilloscope shows the tail's current position
wolftail.mpg (5.32 megs)
More Animatronics